0


Гидрораспределитель мускульный РММ 10
Код:
9327
Поделиться в социальных сетях
Гарантия
Гарантийный срок от 12 месяцев
Гидрораспределитель с ручным управлением мускульный типа РММ 10 стыкового монтажа предназначены для реверсирования движения рабочих органов станков (или других машин). Трехпозиционные распределители помимо реверсирования движения осуществляют остановку рабочих органов при среднем положении золотника.
Принцип работы
Управление распределителем осуществляется электромагнитами. При среднем положении золотника, когда магниты обесточены, линия нагнетания и обе полости цилиндра соединяются с баком. При включении одного из электромагнитов, золотник смещается в крайнее положение и масло от насоса направляется в одну из полостей рабочего цилиндра, а из противоположной полости цилиндра масло направляется в бак.
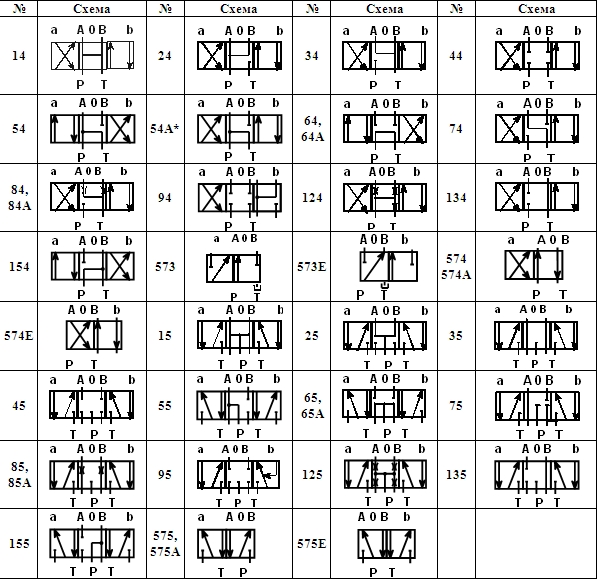
рис. 1 - Схемы распределения потока рабочей жидкости РМР 10.3
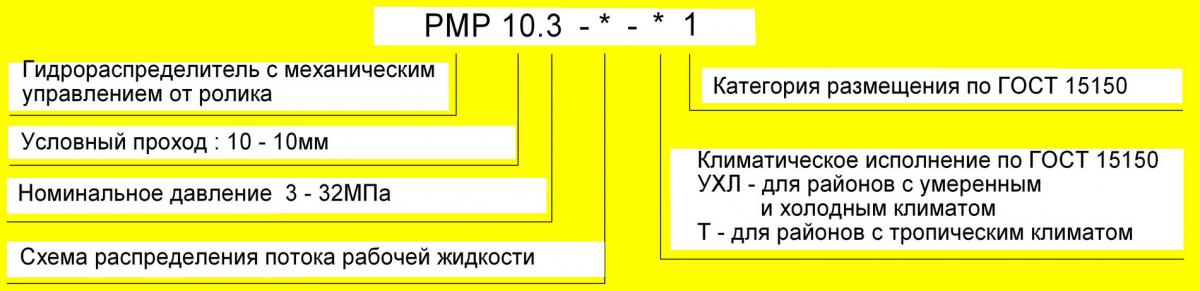
Схема условного обозначения
|
Условный проход, мм |
10 |
|
Давление на входе, номинальное, МПа (кгс/см2) |
32 (320) |
|
Давление на выходе (сливе), максимальное, МПа (кгс/см2) |
16 (60) |
|
Расход рабочей жидкости л/мин, номинальный: |
|
|
25 |
|
40 |
|
80 |
|
Внутренняя герметичность (максимальные внутренние утечки по каждой линии), см3/мин, не более: |
|
|
200 |
|
150 |
|
Ход управления, градус |
21 ± 1 |
|
Сила управления (без давления на сливе), Н |
50 |
|
Положение при эксплуатации: |
|
|
любое |
|
горизонтальное |
|
Рабочая жидкость |
минеральное масло |
|
Номинальная тонкость фильтрации, мкм |
25 |
|
Масса, кг, не более |
4,4 |
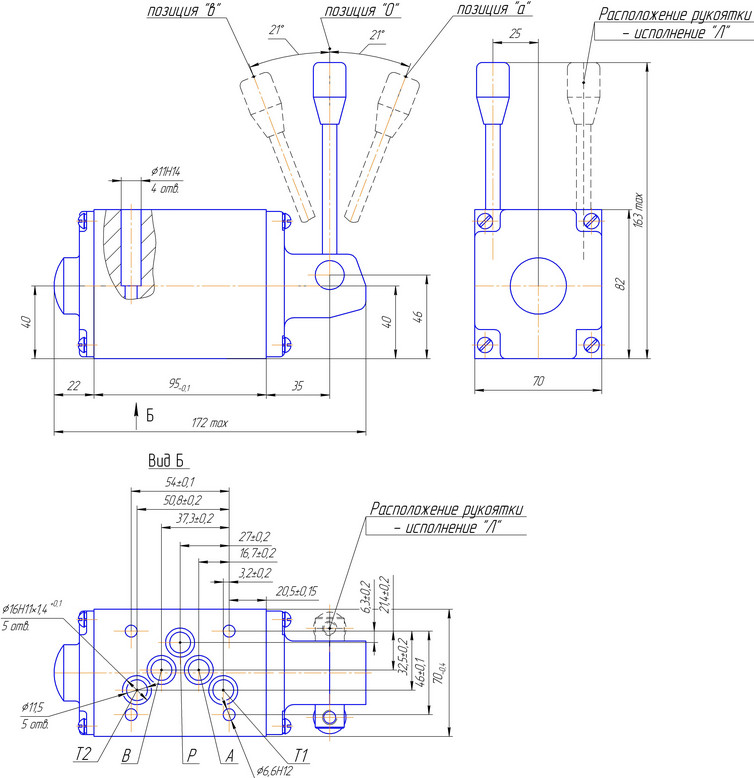
рис. 3 - Габаритные размеры
- Срок доставки Гидрораспределитель мускульный РММ 10 - от 2 дней.
- Стоимость доставки до терминала транспортной компании - бесплатно.
- Возможна адрессная доставка по Санкт-Петербургу.
Добавить отзыв
Похожие приборы



